Автоматическая система маркировки листового проката
В этой категории нет ни одного товара.
Роботизированная установка иглоударной микро-точечной маркировки
 Описание системы
Описание системы
Предметом данного технического предложения является идентификация листового проката, выходящего из линии ЧMK на транспортёре, с учётом температуры листов на момент маркировки, а также температур и других условий последующих возможных обработок до получения конечного продукта.
В целях достижения данного объектива нижеописанное предложение предусматривает поставку антропоморфного 6-осевого робота, оснащённого лазерным датчиком для идентификации точки маркировки и маркировочной головкой с системой иглоударной микро-точечной маркировки.

Особенности системы
Система Polytec Robotics идентифицирует края листа и, следовательно, рассчитывает правильную позицию маркировки (20 см от двух перпендикулярных краёв листа).Состав системы
- Антропоморфный 6 осевой робот с высокой скоростью и точностью.
- Маркировочный блок в комплекте с защитной структурой и системой крепления к роботу.
- Гибкая система до головки робота.
- Наличие сетей Ethernet или Profibus для сбора информации для маркировки.
- Интерфейс на панель оператора робота (Teach pendant) для конфигурации и диагностики.
 Пример роботизированного участка[/caption]
[caption id="attachment_8679" align="alignright" width="300"]
Пример роботизированного участка[/caption]
[caption id="attachment_8679" align="alignright" width="300"]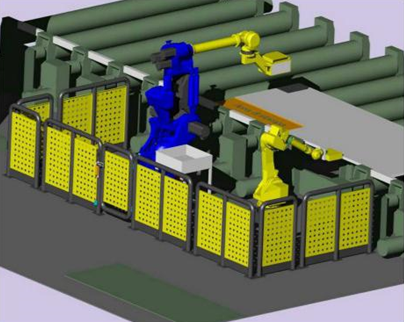 Пример конфигурации с маркировкой на верхней поверхности листа и с края[/caption]
Пример конфигурации с маркировкой на верхней поверхности листа и с края[/caption]
Данные проекта
- Толщина листа ………………………………...………………от 6 до 105 мм
- Ширина листа …………………………………...…………….от 600 до 2100 мм
- Длина листа ……………………………………………......….от 2000 до 12000 мм
- Температура ………………………………………....…………от 5 до 400 °C
- Производительность …………………………………………80-100 листов в час
- Время остановки листа ……………………….……………8-10 сек.(20 символов)
Характеристики требуемых энергоносителей
Основное питание:- Напряжение ……………………………....………………… …0.4 кВ
- Полюса ……………………………………….....………………. 3
- Icc в точке подачи …………………………………….. …….≤10 кА
- Частота линии …………………………….……………… ….50 Гц
- Напряжение ……………………………………….……… … 0.22 кВ
- Полюса ………………………………………….…..………. …2
- Ток ……………………………………………….....…………….16 A
- Автономия …………………………………….………….. ….10 минут
- Частота линии ………………………………………………. 50 Гц
- Пропускная способность, min ……………………………… 2 Н.м3/ч
- Давление, min …………………………………….….....……… 4 Бар
- Температура , max ………………………………...…………….20 °C
Общие условия эксплуатации оборудования Polytec:
Внутренняя установка- Высота ………………………………………………….................……….≤ 1000 м над у.м.
- Температура среды ………………………….............………………от +5°C до +40°C
- Максимальная температура в среднем за 24 часа ……… +35°C (пределы температуры могут быть превышены при наличии особых приспособлений )
- Относительная влажность (без конденсата) …………………от 5% до 85%
- Максимальная температура …………………………………. от -25°C до +55°C
- Относительная влажность …………………………………….от 5% до 95%
Состав поставки
- Антропоморфный 6 осевой робот.
- Соединительный блок робота и маркировочной системы.
- Лазерная система идентификации.
- Электрощит в комплекте с контроллером робота.
- Защитное ограждение с калиткой с взаимооблокировкой на трёх сторонах периметра.
- Инжениринг.
- Программное обеспечение контроля.
- Сертификат соответствия.
 Антропоморфный 6 осевой робот
Антропоморфный 6 осевой робот
Промышленный робот, изготовленный мировыми лидерами (AB, KUKA,COMAU), гарантирует высочайшую надёжность, сокращённое техобслуживание, как плановое, так и внеплановое, сокращённые энергетические расходы и чрезвычайную гибкость.
Трубопроводы и системы робота включают в себя следующее:

- супер-гибкие трубы, специально разработанные для применения в робототехнике, для защиты трубопроводов и проводов;
- соединительные коробки и шарнирные соединения.
Система иглоударной микро-точечной маркировки
 Маркировочная головка для иглоударной микро-точечной маркировки в зависимости от доступов гравюры поверхности позволяет выполнить маркировку около 120 x 80 мм.
Тип символа и его размеры будут согласованы с Заказчиком в процессе работы над проектом, это позволит осуществить полную идентификацию изделия с учётом всех требований Заказчика.
Головка для иглоударной микро-точечной маркировки
Головка будет оснащена защитой и крепёжной системой в виде специально реализованной структуры из нержавеющей стали стойкой к ударам и атмосферному воздействию, гарантируя удобный доступ для техобслуживания.
Маркировочная головка для иглоударной микро-точечной маркировки в зависимости от доступов гравюры поверхности позволяет выполнить маркировку около 120 x 80 мм.
Тип символа и его размеры будут согласованы с Заказчиком в процессе работы над проектом, это позволит осуществить полную идентификацию изделия с учётом всех требований Заказчика.
Головка для иглоударной микро-точечной маркировки
Головка будет оснащена защитой и крепёжной системой в виде специально реализованной структуры из нержавеющей стали стойкой к ударам и атмосферному воздействию, гарантируя удобный доступ для техобслуживания.
Системы питания и контроля
- Подсоединение и подача питания от силового блока до электрощита поставляемого оборудования выполняется силами и за счёт Заказчика.
- Электрощит мощности и контроля включает в себя контроллер робота и систему крепления для соответствующей кнопочной панели.
- Управление роботом выполняется непосредственно с панели оператора, которая, при специальной опции ПО, становится HMI конфигурации и диагностики.
- Программирование маркировочной головки: она оснащена своим контроллером, подключенным по линии ethernet и/или через робота к L1 завода.
- Контроллер робота поставляется с интерфейсом для промышленной сети завода (Profinet/ Profibus/ethernet/IP в зависимости от актуального состояния заводской сети), данное соединение должно быть интегрировано в заводскую сеть силами и за счёт конечного Заказчика. Необходимый обмен данными подлежит согласованию в фазе детального проектирования.
Основные функции визуализируемы на HMI робота:
- Управление работой робота
- Управление коммуникациями
- Интерфейс между автоматизацией и роботом
- Страница с графическими обозначениями сигнализаций по приоритетным уровням
- Страница ручного управления
- Страница автоматического управления
- Страница информации по изделию и маркировке (данные получаемые от Заказчика)